ScanPath®
Ⅰ. Features
Features
ScanPath has three major features:
- Eliminate positional errors with the actual object that occurred offline without calibration.
- Easily teaches difficult curved surfaces and curves, improves productivity by reducing the time required to teach robot trajectory control, and improves quality stability.
- It is possible to measure the construction status and modify the trajectory according to the situation.
Ⅱ. Overview
Function overview (explanation)
ScanPath has the following four functions.
- 1. Measurement of actual workpiece
- 2. Load 3D model
- 3. Point specification
- 4. Work direction and posture specification
Functional overview
Reference diagrams and explanations for function overviews 1) to 4).
1) Measurement of actual workpiece
- The actual workpiece can be measured with a sensor and the robot trajectory can be calculated from there. - It can be done from the actual object without having to prepare 3DCAD data.
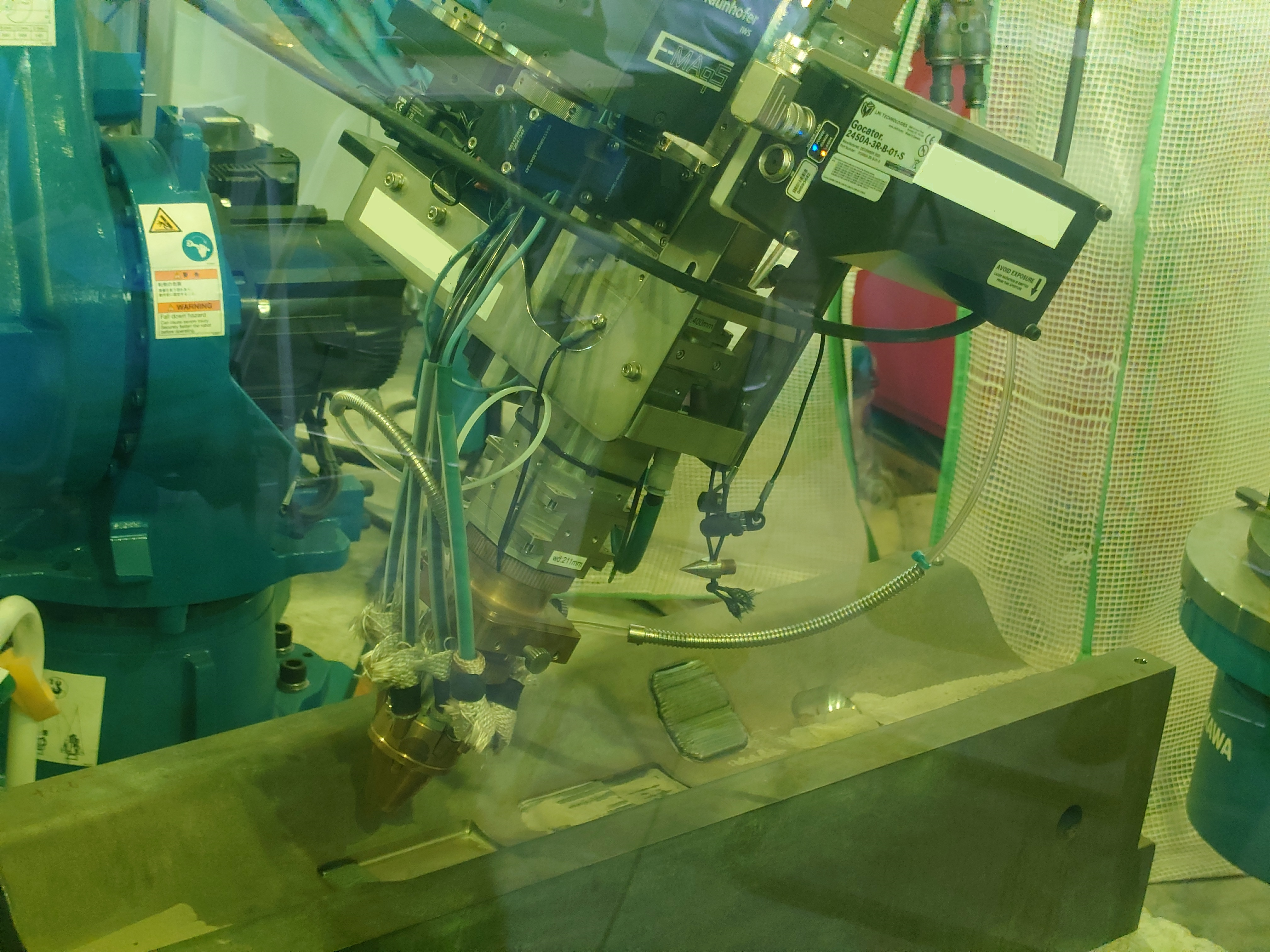
real scan
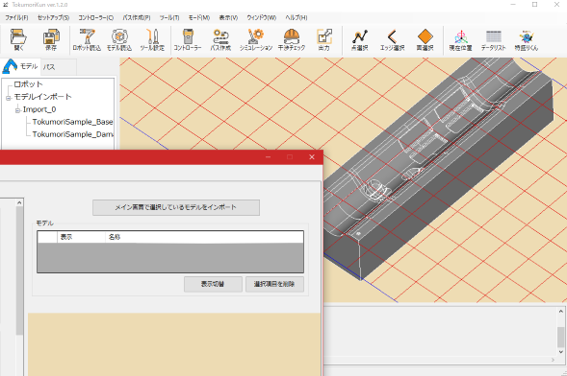
2) 3D model loading
- It is possible to read 3DCAD data from the actual environment. (Intermediate file formats such as STEP can be read)
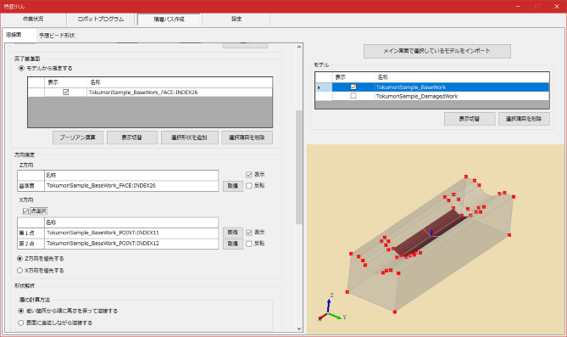
3) Work surface designation
- You can visually select the surface you want to work on by selecting it on the screen.

4) Work direction and posture specification
- Specify a point (Vertex) on the screen and confirm the direction. - Posture can also be specified in detail.
Ⅲ. Operating environment
| 3D Sensor | Gocator(LINX) |
| OS | Windows10/11(64bit) |
| CPU | Intel Core i7-9750H 2.6GHz(6Core) More |
| Memory | 32GB以上 |
| Hard Disk Capacity | 1GB以上 |
| Graphic Board | NVIDIA Quadro T2000 More |