オフラインティーチングソフトウェア

Ⅰ. 特徴・機能
特徴
RoboPathの大きな特徴は、以下の5つになります。
- お客様の用途に合ったカスタマイズが、素早くできます。
- お客様のご要望で、追加機能をオプションにてご提供します。(有償)
- OpenCASCADE(オープンソース)を使用していますので、スマートな図形処理が可能です。
- 全てのロボットメーカの5、6、7軸のロボットに対応しています。(例外あり)
- 操作は簡単、価格は廉価です。
RoboPathの5大特徴
機能
RoboPathには、以下のロボティクス機能があります。
- 入力機能:ツール保持、ワーク保持モード:自動ライン/円弧パス認識
- 適用検討:ロボット動作可能範囲、ロボットジョイント制限値、干渉チェック、特異点検出
- パスの種類:エッジ、カーブ、フェース、ウイービング
- 出力機能:パスベクトル表示、ポイント単位外部信号入力、アニメーション、キャリブレーション
- 対応ロボットメーカ:全てのロボットメーカのロボットに対応(例外あり)
RoboPathのロボティクス機能
Ⅱ. 作業タイプ
RoboPathには、主に以下の対応する作業タイプがあります。
- 溶接(アーク溶接、レーザー溶接、スポット溶接)
- 塗装(スプレー塗装、溶射)
- カット(レーザー、ウオータージェット、カット)
- 研磨(タービンブレード、仕上げ部品の処理
- バリ取り、シーリング、組付け、パレッタイジング、ハンドリング
作業タイプ
溶接
塗装
ウォータジェット カット
Ⅲ. 概要
機能概要(説明)
RoboPathには、以下の5つの機能があります。
- 1. モデルの読み込み
- 対象ワークのCADモデル読み込み、位置変更等の編集が可能です。
- 2. 加工パス自動作成
- モデルのエンティティ(エッジ、ライン、カーブ、等)を使用して、加工パスを自動作成できます。
- 3. ロボット・ツールの挿入
- ロボットの型式を選択してロボットを画面に挿入。同時にツールをロボット先端に装着できます。
- 4. 動作シミュレーション
- パス上をロボット、ツールを使って、動作シミュレーションができます。
- 5. ロボットプログラムに自動変換
- 加工動作をロボットプログラムに自動変換できます。
機能概要(参照図)
機能概要1)~5)の参照図と動画になります。
model.png)
1) モデルの作成・読み込み
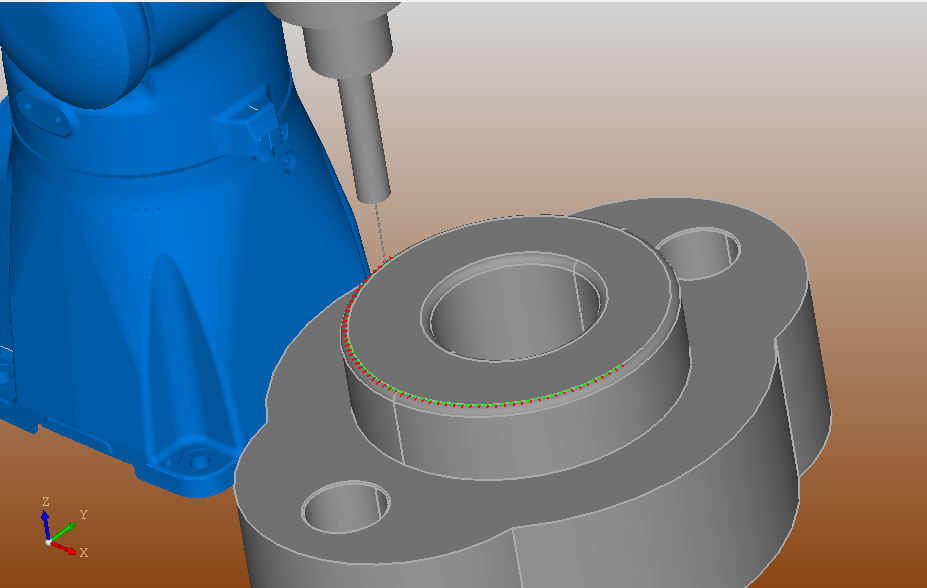
path.png)
2) 加工パス自動作成
tool.png)
3) ロボット・ツールの挿入
4) 動作シミュレーションの動画1
ロボットが動作した軌跡とベクトルが表示される。
program.png)
5) ロボットプログラムに自動変換
Ⅳ. メニューバー
以下、RoboPathのメニューバーについての説明になります。

- 1) 開く
- ファイル選択ダイアルログを開きます。「対象モデル」を選択してモデルファイルを開きます。
- 2) 保存
- ファイルダイアルを開きます。ファイル名を入力して、モデル&パスファイルを保存します。
- 3) ロボット読み込み
- ロボット読込画面が表示され、ロボット読込画面にあるリストから対象ロボットを読み込みます。
- 4) モデル読み込み
- 読み込みたいモデルを選択すると、メイン画面3Dビューに選択したCADモデルが表示されます。
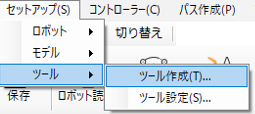
- 5) ツール設定
-
「セットアップ」「ツール」「ツール作成」を選択すると、ツール作成画面が開きツールが作成できます。
「ツール設定」を選択すると、登録されているツールがロードされます。 - 6) コントローラー
- ロボットの順(逆)運動学を計算するための画面が表示され、入力することで運動学計算が実施されます。
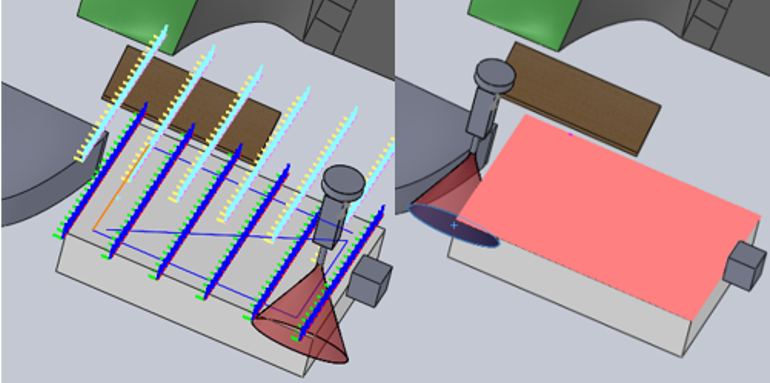
- 7) パス作成
- 本システムのパス作成機能では、CADモデルの「点(頂点)」、「エッジ」、「面」から自動的にパスを作成します。
メイン画面ツールバーから、「点選択」「エッジ選択」をチェック状態にしますと、モデルから「点(頂点)」「エッジ」が選択できるようになります。 パスを作成する際にCADモデルから面を選択することで、Z軸方向を指定できます。選択面の法線方向にZ軸が選ばれます。 - 8) シミュレーション
- プレイバック再生させる為の動作をロボットに記録させます。ロボットの動作を記録する方法には先端をパスに追加する 方法と、上記「7)パス作成」でパスを作成する方法の2つの方法があります。その後シミュレーション画面が表示されます。
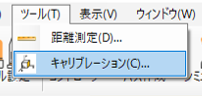
- 9) キャリブレーション
- メイン画面ツールバーより「補正」をクリックして、モデルキャリブレーション画面が表示されますので、3Dビュー座標の3点からなる座標系とキャリブレーション座標の3点からなる座標系からモデル・パスのキャリブレーションを行います。
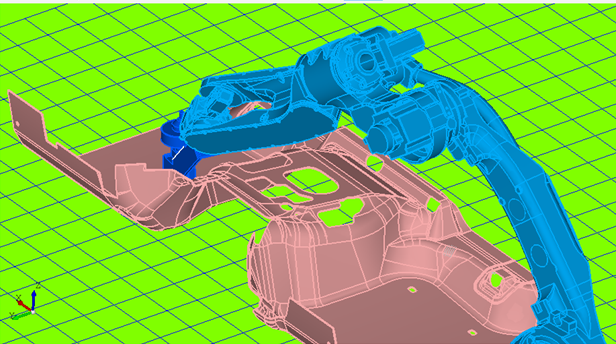
- 10) 干渉チェック
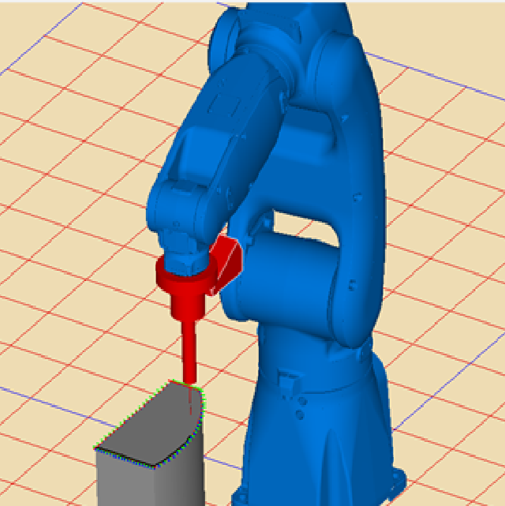
- 「チェック対象物との衝突を検知するとロボットが停止し、衝突したモデルの色が赤く強調されます。また、衝突点が表示され 強調されます。また、衝突点が表示されます。干渉チェック状態の時は、ロボット同士での干渉チェックもデフォルトで行っ ています。
- 11) 出力
- ロボットのメーカに合わせたロボットプログラムが出力されます。
メニューバーの説明動画
衝突を検知したときの3Dビュー
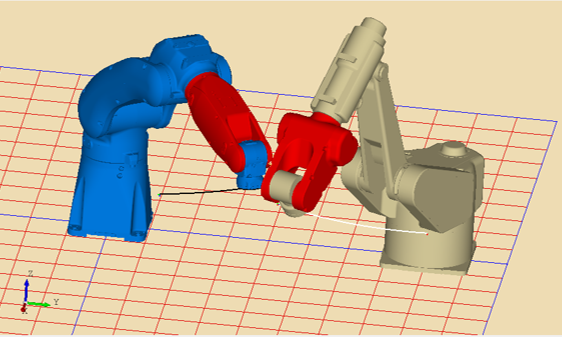
ロボット同士の干渉チェック(赤い部分が干渉している)
Ⅴ. 動作環境
| OS | Windows10(64bit構成のみ) |
| CPU | Intel® Core™ i5 相当以上 |
| メモリ |
Windows10:8GB以上 |
| ハードディスク容量 | 2GB以上 |
FAQ
よくある質問一覧は こちらから