ロボット制御
開発内容
各ロボットメーカーの言語を使用した制御開発の実績があります!
(安川電機社のMotoPlus、川崎重工業社のAS、不二越社、等)
自家製ロボット制御をゼロから開発した実績があります!!
各メーカーのロボットコントローラー・ティーチペンダントと同様のものをゼロから開発した実績があります!
産業用ロボット、サービスロボットに関する以下の開発をお請けいたします。
レスキューロボット(蛇ロボットシミュレーション)
- モーションコントローラの接続
- モーションコントローラAPIを使用したロボット動作制御
- 順運動学、逆運動学計算
- 干渉チェック、リミットチェック、到達チェック、特異点チェック
- 直線補間、円弧補間
- 振動制御
- キャリブレーション処理
- ティーチングパス作成、編集
- トルク制御
- 動作シミュレーション
- 多機種間(例:KAWASAKI⇒MOTOMAN)のロボット言語変換
- サービスロボットの制御開発アーム(マニュピュレータ)制御
- センサー制御
- ロボット自走制御
- ロボット位置、姿勢制御
- ツール制御
- 双腕動作制御
- アーム速度制御
- AI機能
- その他各種ソフトウェアの開発ビジネスソフトウェアの開発
- CADアプリケーションの開発
- ネットワークシステム設計/開発
開発実績
| 平成30年度 | AGV(自動搬送機)を活用したシステムの開発 |
| 平成29年度 | ロボット日本ロボット工業会助成
ロボット導入促進のためのシステムインテグレータ育成事業による「溶接ライン追跡・制御ロボットシステム」開発⇒パッケージソフト“WeldPath-1”として販売中。 |
| 平成28年度~ | パイプベンデングマシン(川崎重工ロボット(3機種)、ベンディング専用機(2機種))シミュレーション&CAMシステム開発 |
| 平成28年度 |
|
| 平成28年度~ | 分子追跡陽子線治療システム開発 |
| 平成28年度~ | プレカット 3D CAD システム開発 |
| 平成28年度 | ロボット メーカー用 VRC ( Virtual Robot Controller)システム開発 |
| 平成27年度~ | 産業用ロボットを使用した原子炉事故処理業務 |
| 平成27年度 | 建築部材、加工編集ツール(木材プレカットメーカー用)
1. 概要 建築部材、加工編集向けに特化した2D/3DハイブリッドCADアプリケーションの開発に向けて、社内向けのプレゼン用アプリケーション(OpenCASCADE使用) |
| 平成27年度 |
|
| 平成27年度 | ダイレクトティーチングシステムの開発
ロボットの先端にトルク情報を監視することで、押す力の方向を感知でき、その方向にロボットを誘導することで、ボタンで位置情報を与え、ダイレクトティーチングを実現した。 |
| 平成27年度 | レーザーセンサを使用した、ロボット研磨作業における、削り残し検出と自動パス作成後のロボット再研磨作業 |
| 平成26年度 | トルク制御による障害物干渉・停止
常時モーションコントローラで計測しながら、モータから来る負荷(トルク)の大きさにより、障害物の干渉(特に人)をチェックし、干渉があった場合停止する。 その後動作再開ボタンで、その位置からロボット動作を再開する。 |
| 平成25年度 | YAMAHA直行ロボットを使用した研磨システム開発
自動車用部品の金型研磨作業において、YAMAHA直行ロボット(3軸~6軸) 研磨パス自動作成システム開発 |
| 平成25年度 | HALCONを使用したピック&プレースシステム開発(カメラは1眼) |
| 平成25年度 | 電磁ノイス測定用ロボット自動パス作成システム開発
電気、電子機器の電磁ノイズを自動測定するために、ロボットの測定用自動パス作成システムを開発 |
| 平成23,24年度 | アーク溶接ロボット向けアーク溶接自動化システム開発
(CCDカメラで アーク監視)(東京都中小企業中央会助成事業)→WeldPath-2として開発中 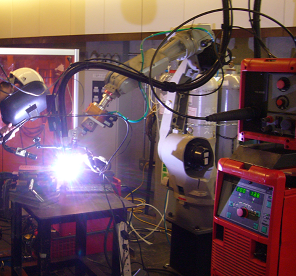
ロボットアーク溶接 
溶融池観察実験 |
| 平成23、24年度 | 建築用木材(プレカット)加工ロボット(FANUC 大型ロボット) 用加工パス作成システム開発
(形状加工(隅木欠、三角欠、合掌ほぞ、等)、干渉チェック、等) |
| 平成23年度 | 3次元カメラを使用したビジョンセンサー連動形状認識ソフトウエア連動リアルタイムでのコントロール内データ(位置、姿勢)書き換えシステムの開発
開発対象ロボット:MOTOMAN、川崎重工、NACHIロボット |
| 平成21、22、23年度 | 機械工作メーカー向け垂直多関節6軸ロボット制御、アプリケーション開発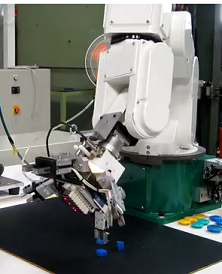
(組み付け:ターレット使用:外観検査 Insightシステム使用) (4軸、5軸が直線になる) |
| 平成21年度 | 経済産業省 ものづくり中小企業製品開発等支援プロジェクト
塗装膜厚シミュレーション、モーションキャプチャー システム開発 |
| 平成15年度 | 核燃料再処理工場内の部品、資材搬送用の7軸クレーン・マニピュレータ制御システム開発
Cimetrix社製ロボティクスCAD CODEシステム利用 処理管理工程がネットワークになっており、その各ノード(ネットワークの基点)における工程管理(シミュレーション)、原価管理(タクトタイム管理)を行う。 |
| 平成13,14年度 | 原子炉解体用 6軸マニピュレータシステム開発
米国Cimetrix社製ロボティクスCAD CODEシステム利用し、シミュレーションにてパス作成する。 1回目はプラズマを点火しないでパス上をプラズマトーチが移動しながら、カメラでTCPの位置を確認、障害物が発生した場合停止させ回避する(パス修正)。 2回目はプラズマを点火しながら原子炉を切断していく。 |