Ⅰ部. ロボット6軸
1. 作業準備
RobotWorks簡単操作 準備
- モーションモード 通常はT:ツール実行
- その他にパート実行、ポジショナーモードがあります。
- ツールは準備前に作成しておいてください。
- モーション設定は通常は設定済み(デフォルト値)を使用することで、ほぼ要件が満たされます。
a:モーションモード
RobotWoksの加工形態には以下の3つの作業形態があります。
最初にモーションモードを選択して頂きます。
- T:ツール実行(ツールがワーク上を動く:例:ミリング)
- P:パート実行(ワークがツール上を動く:例:グラインダー研磨)
- S:ポジショナーモード(ロボット&ポジショナー協調作業)
b:ツール設定(図-1 参照)
RobotWorksでは、最初にツール設定をして下さい。(必須)
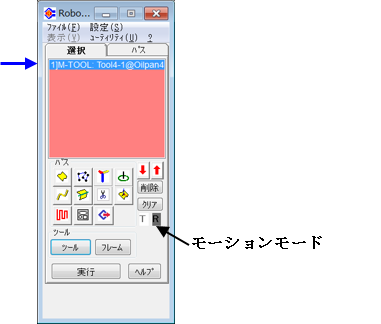
図1-1 ツール設定
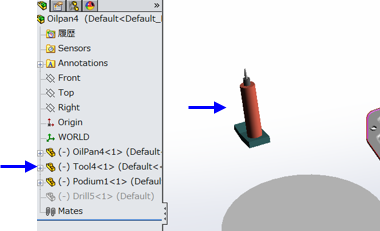
図1-2 ツール設定(図-1の青矢印:ツール)
c:モーション設定(図-2 参照)
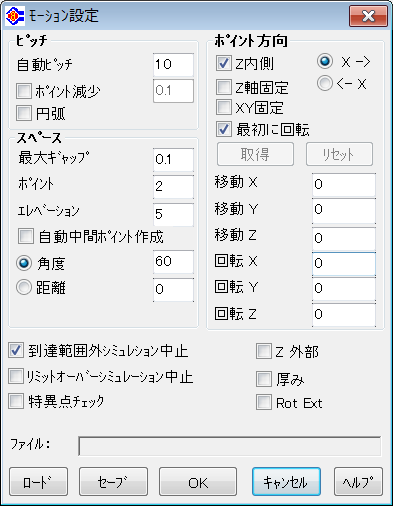
図-2 モーション設定
RobotWorksでは、最初に設定しておくいくつかの初期値があります。
動作に関する設定としてモーション設定と言います。
- 自動ピッチ:パスポイントのピッチを定義できます。(図-3 参照)
- ポイント減少、円弧:ロボットファイル(実機対応データ)直線→2点、円弧→3点 で対応します。
- スペース(図-4 参照) パスが複数ある場合、2つのパスの間にスペースパス(つなぎのパス)を自動作成します(初期値として中間に2ポイント、高さ(障害物回避用)、5mm設定されています)。
- 特異点チェック:4軸5軸が直線になるロボット姿勢を特異点と言いますが(ロボット動作が不能)、これをチェックする場合ボタンをONにします。
- ポイント方向:Z軸固定(図5参照)Z軸のツール回転を固定して、動作を特定方向に導く場合
- 移動X,Y,Z,Rx,Ry,Rz: ツール座標系でX,Y,Z方向に与えられた値で移動(オフセット)、また、ツール座標系各軸回転方向に移動(オフセット)します。すべてのパスポイントに適用されます。 (パス内の個別のポイントに対してもオフセット可能です)
- Z外部:6軸の先端にツール相対軸7軸を付加した場合(“6.適用事例 NSKオプション”参照)
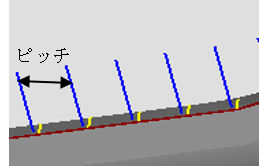
図-3 パスピッチ
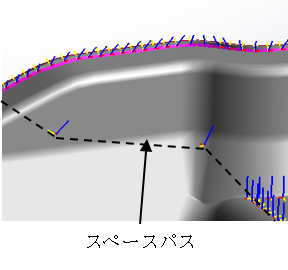
図-4 スペースパス
図-5-1 Z軸固定
図-5-2 Z軸固定なし
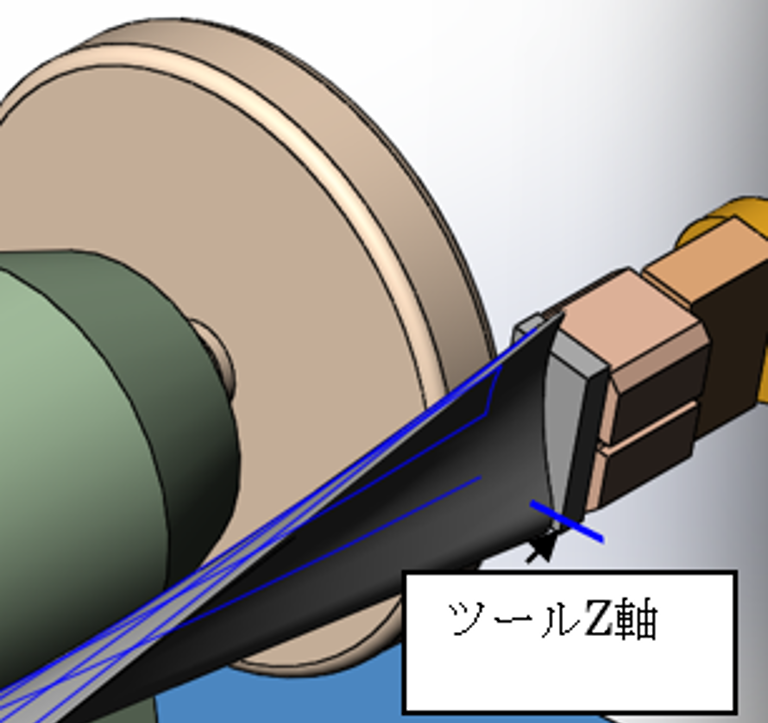
図-5-3 Z軸固定