5. ロボット設定
a. 対応ロボット
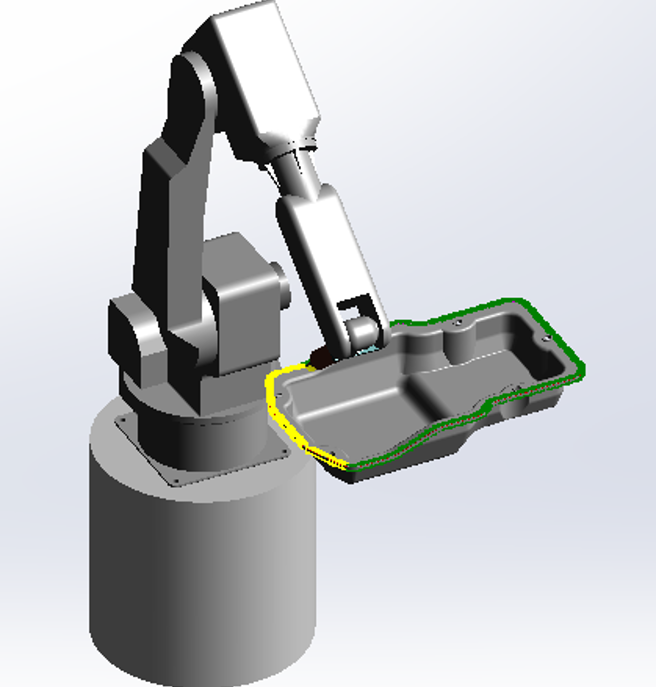
図-32 リミットチェック
現在対応できるロボットは以下のロボットメーカのロボットです。(順不同、敬称略)
MOTOMAN、三菱電機、DENSO、FANUC、KAWASAKI、Panasonic、KUKA、ABB、STAUBLI、REISE
b.ロボットの運動に関するチェック
干渉チェック(画面にあるすべてのソリッドが対象)
到達チェック:ロボットが到達外に行きますと、シミュレーション動作が停止します。
リミットチェック:各軸のソフトリミットが設定できます。そのソフトリミットを越えます。
図-32で黄色がリミットオーバー、緑色が到達可能、赤(図には無い)が到達可能です。
特異点チェック:4軸、5軸が直線になる場合をチェックします。
c.TCP設定
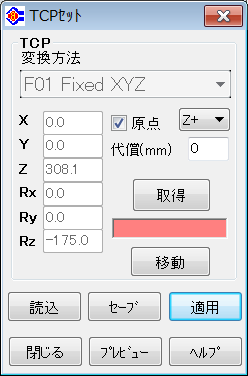
図-33 TCP設定
通常ツールの原点がTCPになっていますが、変更したい場合はメニユーを使用して変更できます。(図-33)
d.ロボットの移動
ポデムを使用してロボットを簡単に移動できます。
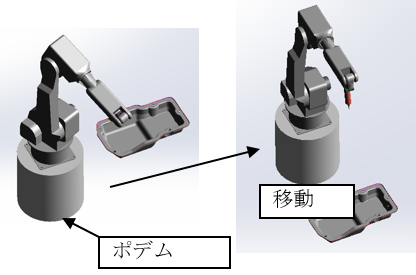
図-34 ポデムによるロボット移動