6.ロボットファイル作成
a.コンバートフォーム
RobotWorksで作成されたロボットプログラム(パス)は、コンバートフォームという表で参照することができます。(図-35)
この表には、パスポイントの位置(X,Y,Z)、姿勢(Rx,Ry,Rz)、各軸の変位の参照、どのパスポイントで加工を開始するかというロボットコマンド(イベント(例:ARC ON))の挿入などが可能です。
座標系
測定位置
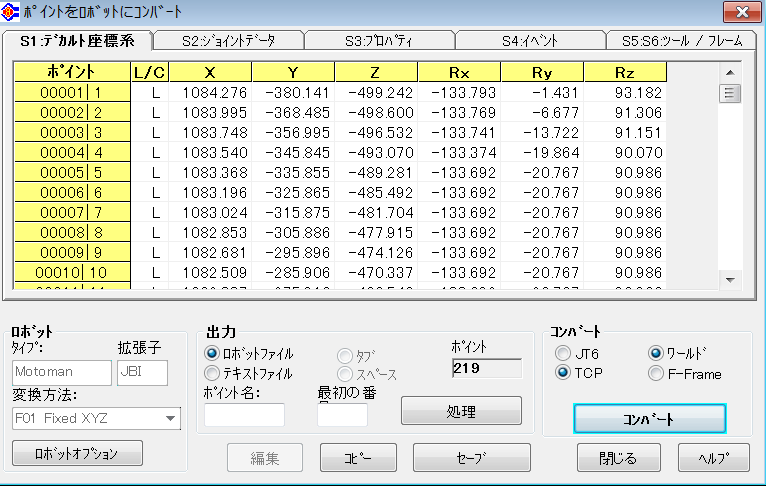
図-35 コンバートフォーム
6.ロボットファイル作成
a.コンバートフォーム
RobotWorksで作成されたロボットプログラム(パス)は、コンバートフォームという表で参照することができます。(図-35)
この表には、パスポイントの位置(X,Y,Z)、姿勢(Rx,Ry,Rz)、各軸の変位の参照、どのパスポイントで加工を開始するかというロボットコマンド(イベント(例:ARC ON))の挿入などが可能です。
座標系
測定位置
図-35 コンバートフォーム