7. その他の機能
- 1. キャリブレーション
- RobotWorksでは、モデル空間(RobotWorksの作業空間)と実空間(実機が動作する空間)の補正のための機能があります。それぞれの対応する3点か1点で補正できます。モデル空間の座標系は実空間に合わせるためにユーザー座標系を使用することも可能です。
- 2. ロボット位置の最適化
- ロボット位置の最適化は、ロボットの使用するエネルギー(電力)の最適化です。したがって、サイクルタイムも最適になるはずです。RobotWorksでは、最適位置候補から1つを選択して移動できます。
a.キャリブレーション
RobotWorkwを現場で使用する場合、RobotWorksで作成したモデル空間と、現実の実機加工における実空間との補正(キャリブレーション)する必要があります(モデル空間と実空間で乖離があります)。これを補正する機能がRobotWorksにはあります。以下の2つの方法です。
対応する3点の位置で補正する。(図-36)
対応する1点の位置(x,y,z)と姿勢(Rx,Ry,Rz)で補正する。(図-37) 上記“3点の位置で補正する”場合、モデル空間をSolidWorksの座標系にあわせるのではなく、実空間のユーザー座標系をモデル空間に実現して補正することも可能です。(図-38 参照)
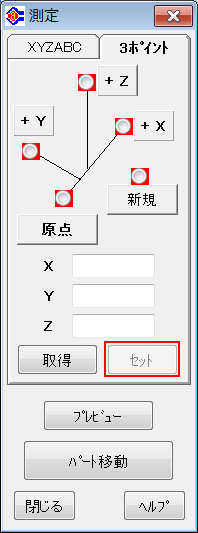
図-36 3点補正
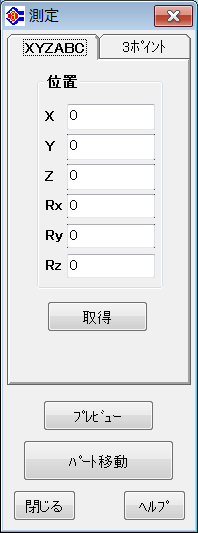
図-37 1点補正
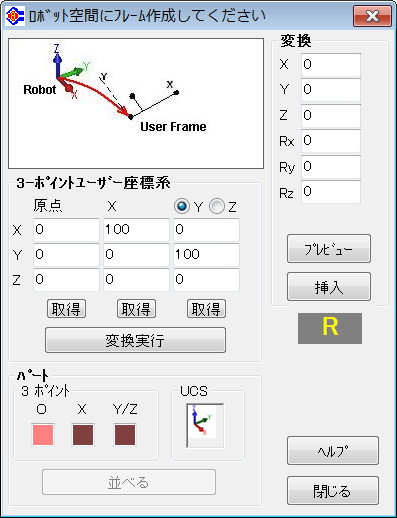
図-38 ユーザー座標系の作成
b. ロボット位置の最適化
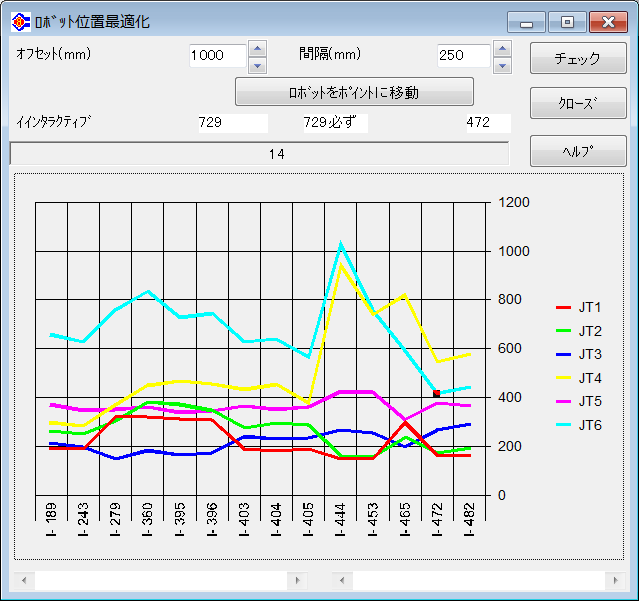
各軸のエネルギーから位置の候補を選択
ロボットの位置とワークの位置が最適になるよう2つの位置(パスは既に作成済み)を決める機能です。
- ここでの最適化は以下を想定しています。
- ①エネルギー(電力)の最小化
- ②サイクルタイムの最小化(エネルギー最小化からみて)
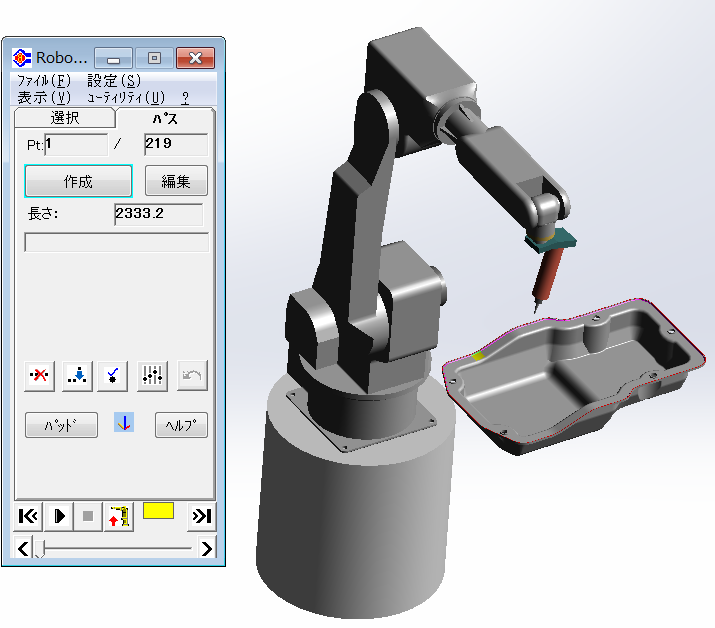
図-39 最適前

図-40 最適化移動
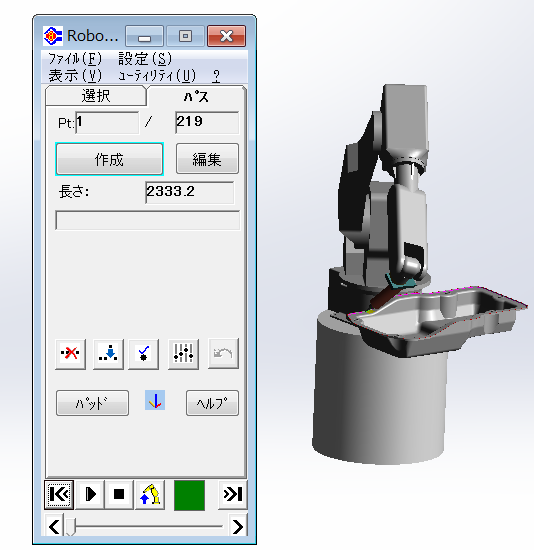
移動後のロボット位置