Ⅱ部. 外部軸
外部軸は、パスモーションではロボットと同期しますが、別の軸ということになります。
A. 外部軸におけるパス概要
図-外-1 ポジショナーコントロール
図-外-2 整列オプション
- ベースはロボットが回転している間、常時固定されているように求められています。
- 軸1はベース上を回転でき、必ず定義されなければなりません。
- 軸2は軸1上(軸1の上に設定されている)を回転でき、常にロボットと一緒に動作します。
- 外部軸を使用する場合、ポジショナーファイル(.pst)を定義してください(図-外-4 参照)
(通常、予めファイル名をつけて、定義しておきます。ロード→適用→閉じる)
外部軸パス作成を簡単に説明しますと、以下のような使用法が取られています。
- ポイント1におけるツール姿勢は、パスのすべてのポイントに適用するようにしています。
- パスは通常の(6軸)ロボットと同様な方法で作成できます。
- ツールがポジショナーなしに正しい姿勢でポイントに到達できれば、外部軸をまったく動かす必要はありません。
- ツールは、自身のZ軸周りを回転することができます。
- 外部軸を使用してパスを作成した後、更なるオプション(ポジショナーコントロール)が利用できます。このオプションは外部軸を「動かす」別な方法です。(図-外-1参照)
- 整列オプションを設定した場合は、別のパス作成を検討します。(図-外-2参照)
パス作成におきまして、以下の点を留意してください。
外部軸パス作成作業においては、手作業の時間を大幅に削減してくれますし、危険で費用のかかる作業を減らしてくれます。しかし、ユーザー自身も、合理的な環境を提供しなければなりません(外部軸において、干渉チェックはシミュレーションで見つけて回避するようにします)
「ポイント1のツール姿勢を維持する」ということは、ロボットから2つの自由度を奪うことを意味します。そして、2軸ポジショナーにその自由度を与えることになります。これにより、ユーザー自身も外部軸の姿勢制御を支援することになります。
B. 外部軸におけるパス作成
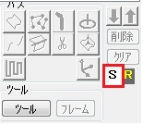
図-外-3 モーションモードの選択
外部軸を使用することで、ロボットの動作負担を少なくします。
また、ツールのX軸、Y軸周りの回転を出来る限り行わないようにパスポイントを作成します。
(外部軸を使用する場合、ライセンス(有償)が必要です)
1. モーションモードの変更
モーションモードの文字が「S」に変わるまでクリックしてください。
2. ポジショナーファイルの作成、読み込み
設定:ポジショナーを選択して、ポジショナーファイルを作成(または読み込み)して、適用ボタンを押下します。(図-外-4 参照)
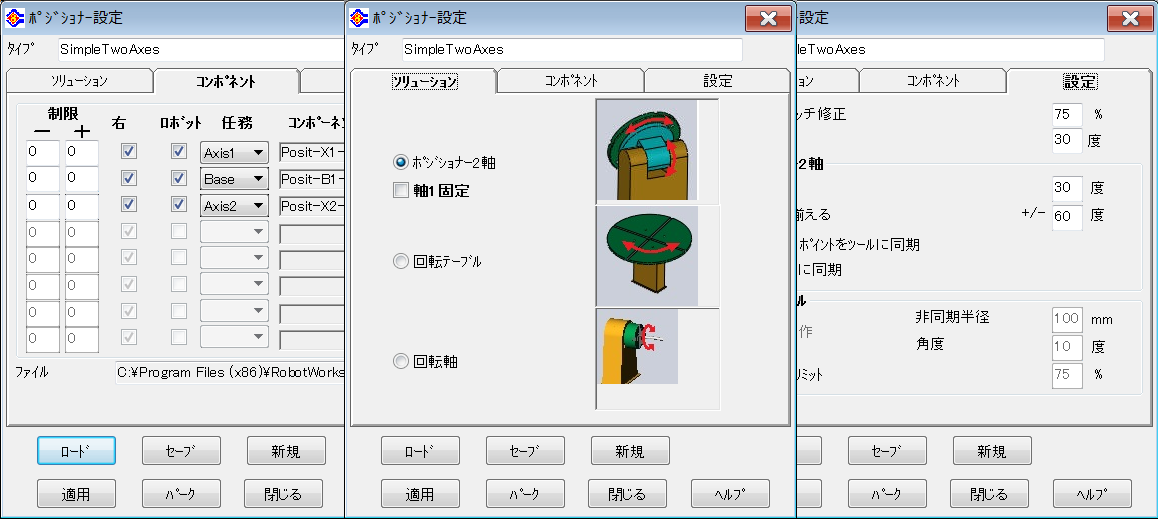
図-外-4 ポジショナーファイルの作成、読み込み
1) ソリュ-ションタブ
ソリューション:使用されているポジショナーのタイプ
軸1固定 :2軸ポジショナーの内最初の1軸を固定したい場合、ポジショナーは現在の場所に置かれます
(軸2のみが動作します。またツール位置は同様に移動しなければならないでしょう)
2) コンポーネントタブ
リミット:最小と最大角度が入力できます。
右:軸回転方向が右手座標系を使用しているか否かのチェックです。
ロボット:軸がロボットと協調動作で移動しているかのチェックです。
任務:軸の役割; ベース、軸1、軸2
コンポーネント名:アセンブリにおけるパートの名前
PSTファイル:ポジショナーデータファイル名とパス
C. パス作成
図-外-5 ポジショナーパス
パス作成は、ロボット6軸と同様な方法で作成してください。
(図-外-5 動画を参照)