ScanPath®
Ⅰ. 特徴
特徴
ScanPathの大きな特徴は、以下の3つになります。
- オフラインで発生していた実物との位置誤差をキャリブレーションなしで解消
- 難しい曲面、曲線の教示も簡単にでき、ロボット軌跡制御教示にかかる時間の削減による生産性の向上、品質の安定性も向上
- 施工状態の計測、状況に応じた軌跡の修正が可能
ScanPathの3大特徴
Ⅱ. 概要
機能概要(説明)
ScanPathには、以下の4つの機能があります。
- 1. 実物ワークの計測
- 2. 点群データ読込
- 3. 点指定
- 4. 作業方向、姿勢指定
機能概要
機能概要1)~4)の参照図と説明になります。
1) 実物ワークの計測
- 実物ワークをセンサーにて測定し、そこからロボット軌跡を算出することができます。 - 3DCADデータを用意しなくても、実物から行うことが出来ます。
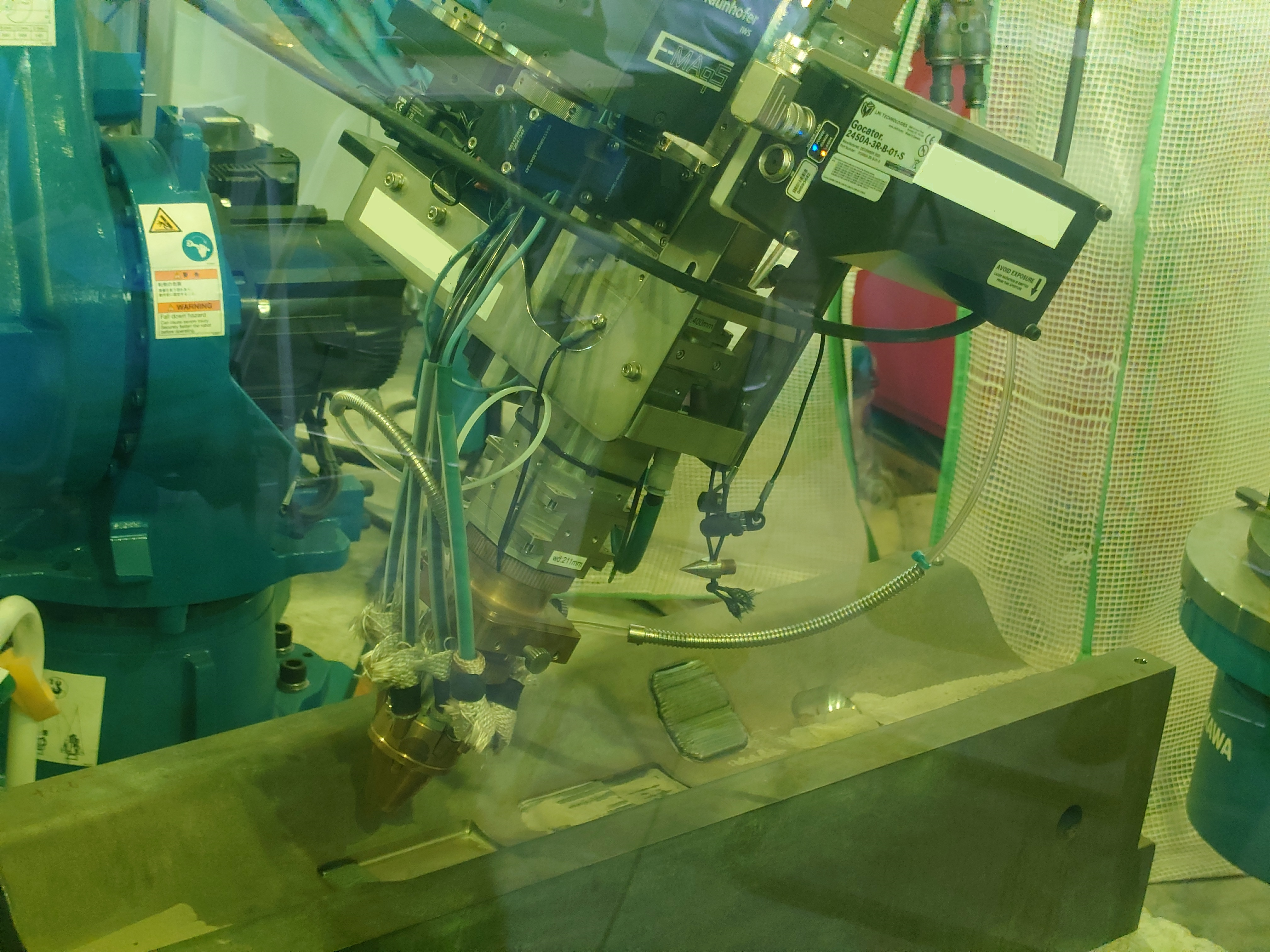
実物スキャン
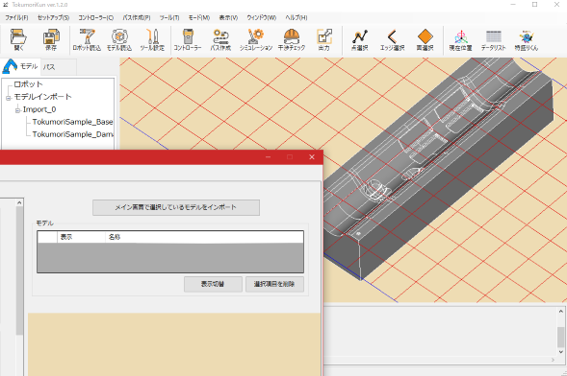
2) 点群データ読み込み
- 他の機器で撮影した点群データを読み込み可能です。(STL,PCDなどの中間ファイルフォーマットが読み込み可能)
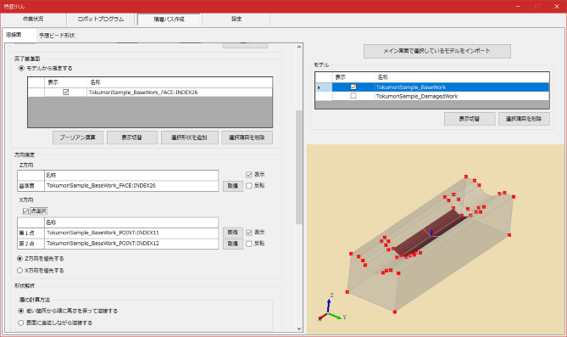
3) 作業面指定
- 作業したい面を画面上から、選択することにより、視覚的に選択できます。

4) 作業方向、姿勢指定
- 画面上の点(Vertex)を指定し、方向を確定させます。 - 姿勢も細かく指定可能です。
Ⅲ. 動作環境
| 3Dセンサー | Gocator(LINX) |
| OS | Windows10/11(64bit構成のみ) |
| CPU | Intel Core i7-9750H 2.6GHz(6 コア) 相当以上 |
| メモリ | 32GB以上 |
| ハードディスク容量 | 1GB以上 |
| グラフィックボート | NVIDIA Quadro T2000 相当以上 |