WeldPath®-1
概要
熱膨張による溶接ラインのひずみ補正は、ロボット溶接に欠かせない機能です。
WeldPath-1では、このひずみを除去して、正しい溶接ラインに沿った溶接を実現しました。
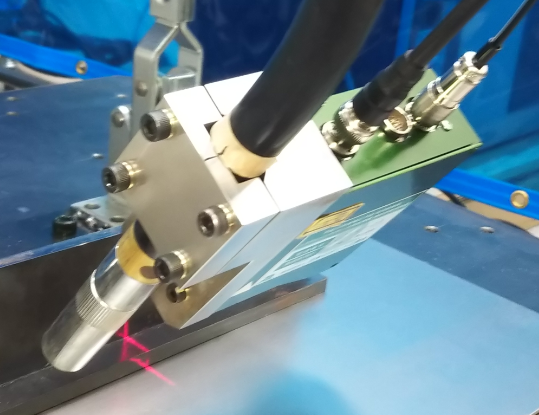
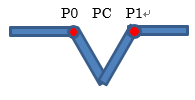
ティーチング(教示)ポイントに従って、溶接する場合、第1点に教示とおりトーチを進めて、そこから数センチメートル先のポイントにラインレーザー投影して(下図左赤い線)、溶接方向(Z座標)に対する横断面(X,Y座標)をカメラで撮像して、座標値を測定します(光切断法)。これにより、ポイント座標値をリアルタイムに補正することができます。Ⅴ字開先の場合、P0(左の折れ曲がり点)とP1(右の折れ曲がり点)から中心点PCを求めます。
この時、P0とP1は開先の断面の形状から求めることができます。座標値は、レーザーから投影される赤い光をカメラで取り、映像から算出します。注1) この方法をティーチングに適用しますと、ダイレクトティーチングが可能になります。
隅肉における光切断法
V字開先溶接ライン補正計算
下図を参照して下さい。真ん中にある図形は、ラインレーザー(図-1の赤いラインを照射するレーザー)によるV字開先の断面図です(実際は斜め前方から撮像している)。
このカメラ映像をマッピングして寸法を計測します。 図-1のレーザーボックスの中には、ラインレーザーと超小型カメラが内蔵されています。
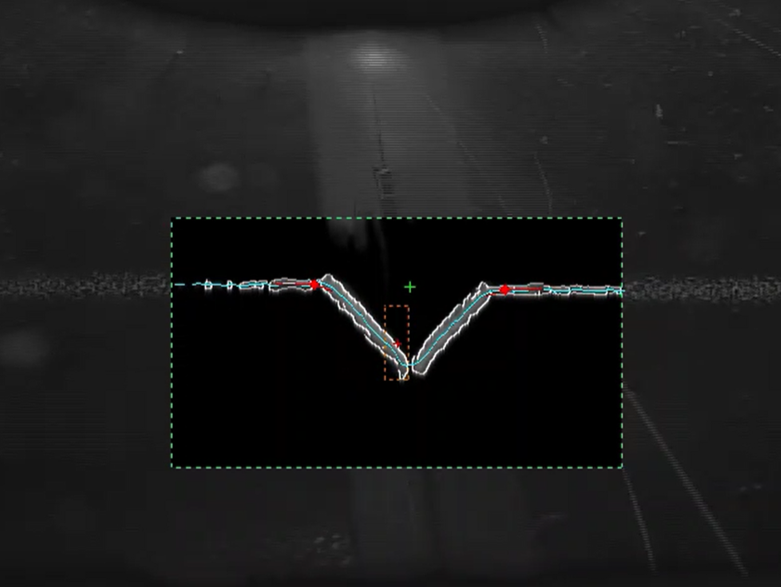
V字開先断面図
V字開先断面図の動画
カタログダウンロード
WeldPathカタログダウンロードは こちらから