4. パス作成(編集)
パスポイントの削除や追加、平面の投影、コーナー処理が行います。
a. パスポイントの削除、追加
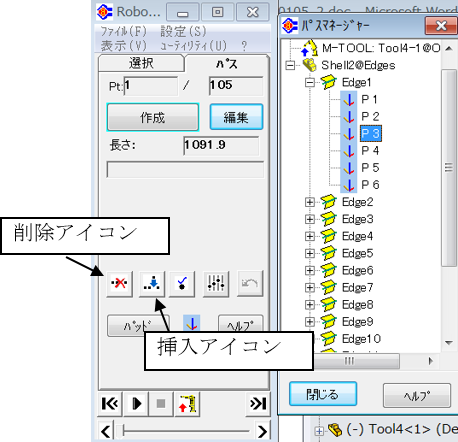
図-28 パスポイントの削除、挿入
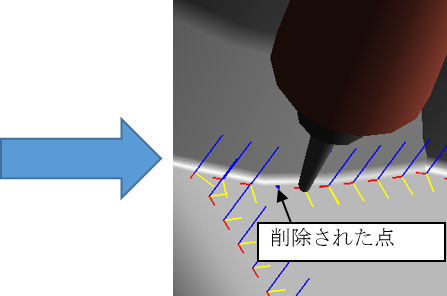
編集機能を使用して、メインメニューの「削除」アイコンクリックで削除できます。
同様にメインメニューの「挿入」アイコンをクリックする。(図-28 )
パス全体(図-29 参照)では”Shell2@Edges"、リード単位(小さなパス)では”Edge3”のリードプロパティーを変更してその範囲内の位置、姿勢を変更できます。
(図-29 では、姿勢(Rx))
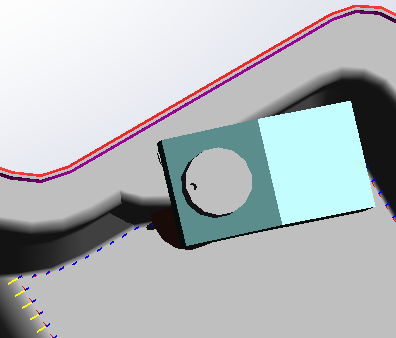
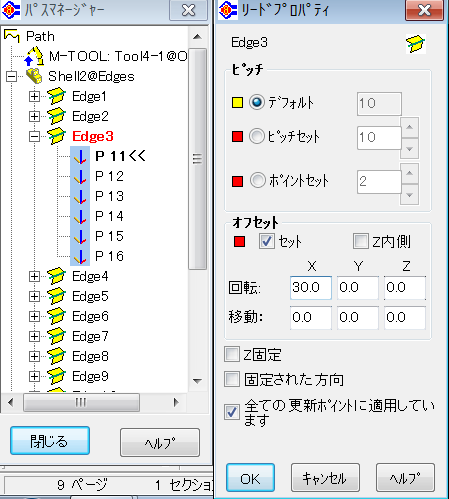
図-29 パスのプロパティー(位置、姿勢)の変更
b. 平面の投影
図-30 平面上の曲線の投影
たとえば、曲面上に、平面で描かれた図形の投影曲線(複合カーブ)を作成することが出来ます。(図-30参照)
この複合曲線をロボットのパスとして使用できます。
C. コーナー処理
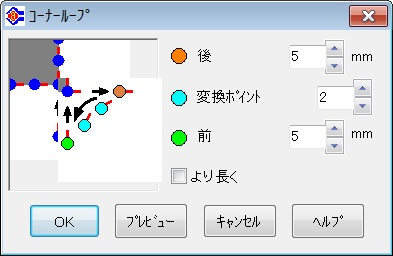
図-31 コーナーループ
鋭角的なコーナー(例:直角)を回転する場合、急激な変化に対応するコーナー処理が必要となります。
RobotWorksでは、以下の2つの方法で対応しています。
コーナー解決
次の2つの方法があります。
- コーナーの姿勢を、コーナー直前の姿勢とコーナー直後の姿勢の中間値とします。
- コーナー前後に、2つのポイントを追加します。
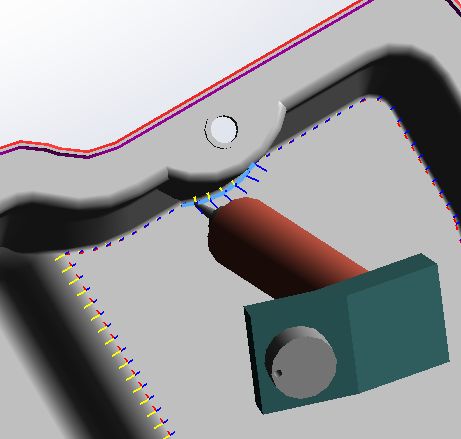
コーナーループ
コーナーから離れたところ(空中)に追加のポイントを作成します。これによって、コーナーの角に全く接触することなしに、ツールは最初の面に対して直角で離れ、もう1つの面に直角で進入することができます。